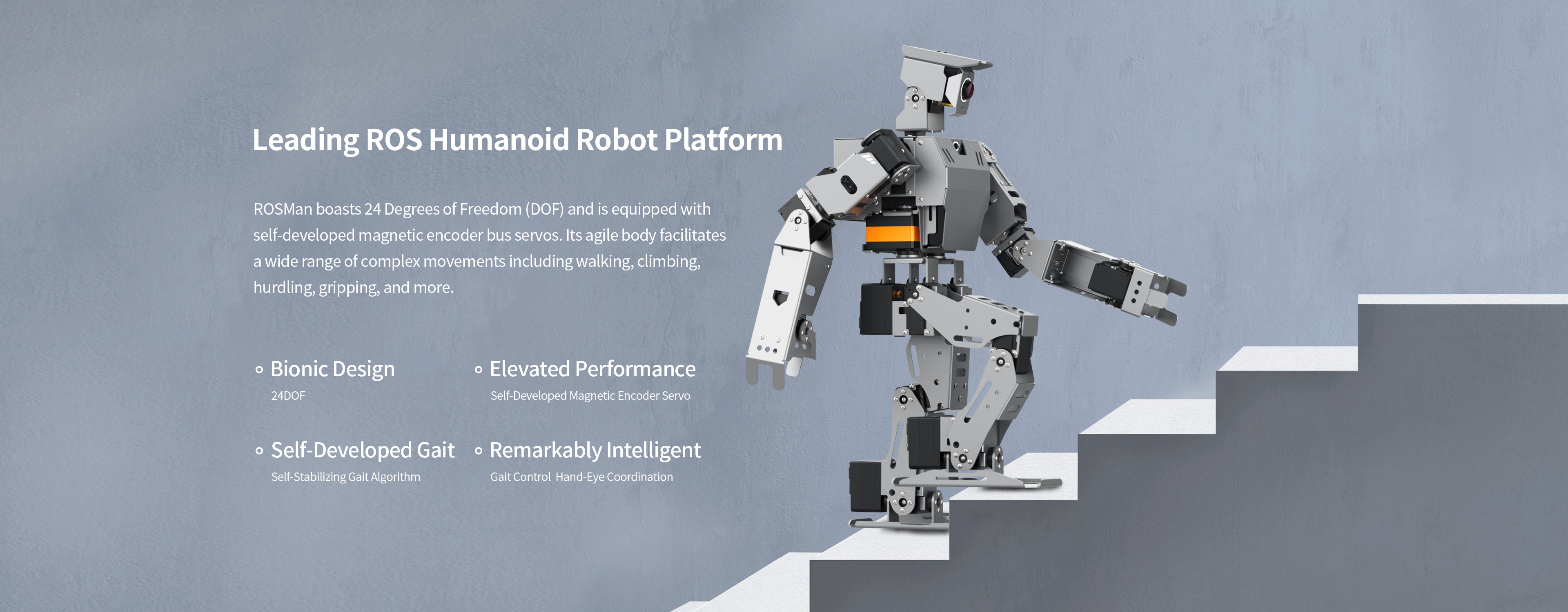
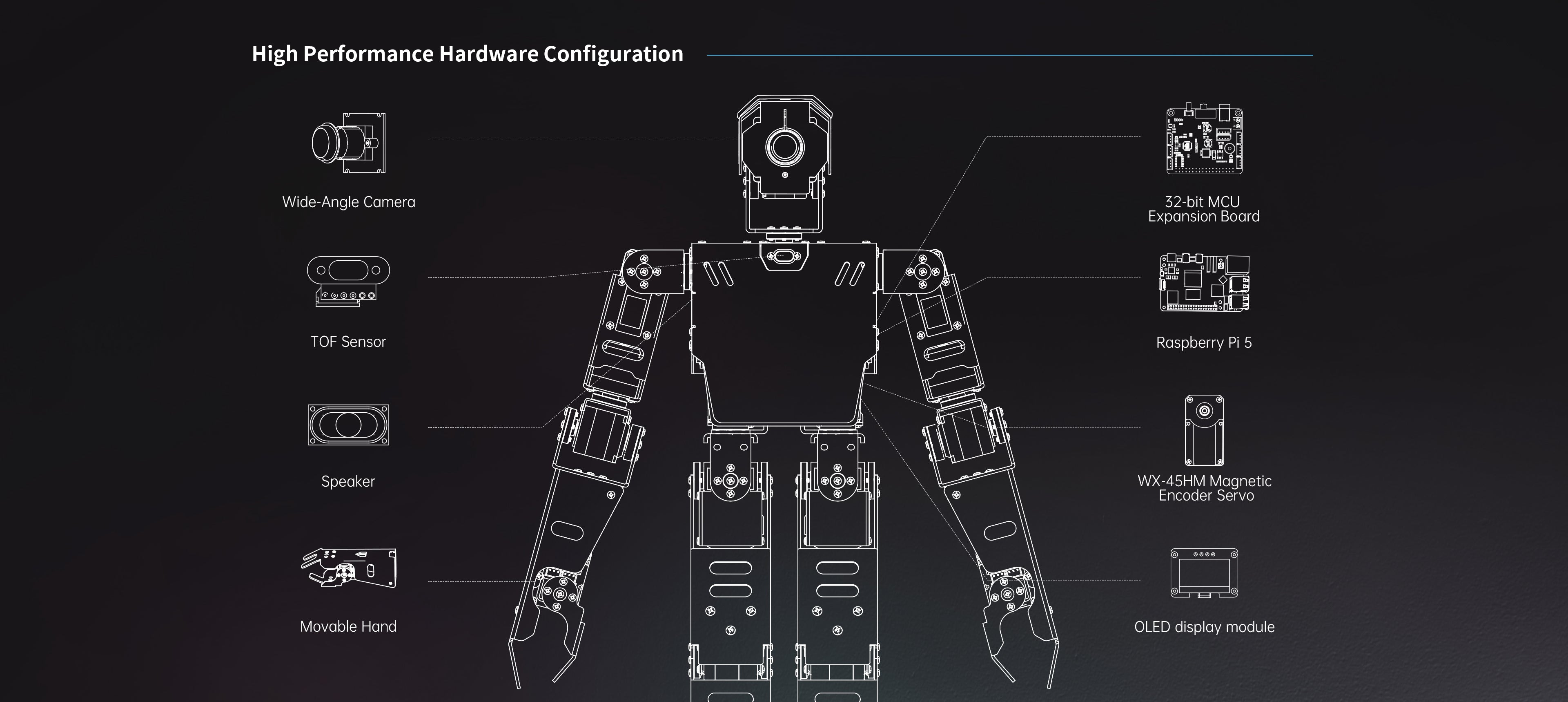
ROSMan is an advanced humanoid robot powered by Raspberry Pi 5 and equipped with intelligent serial bus servos, an AI camera, TOF sensor, OLED display, and other high-performance hardware. It serves as an ideal platform for universities seeking to develop advanced humanoid robots, providing opportunities for learning, research, and practical application in fields such as humanoid robot gait control, hand-eye coordination, visual algorithms, deep learning, and more.