-

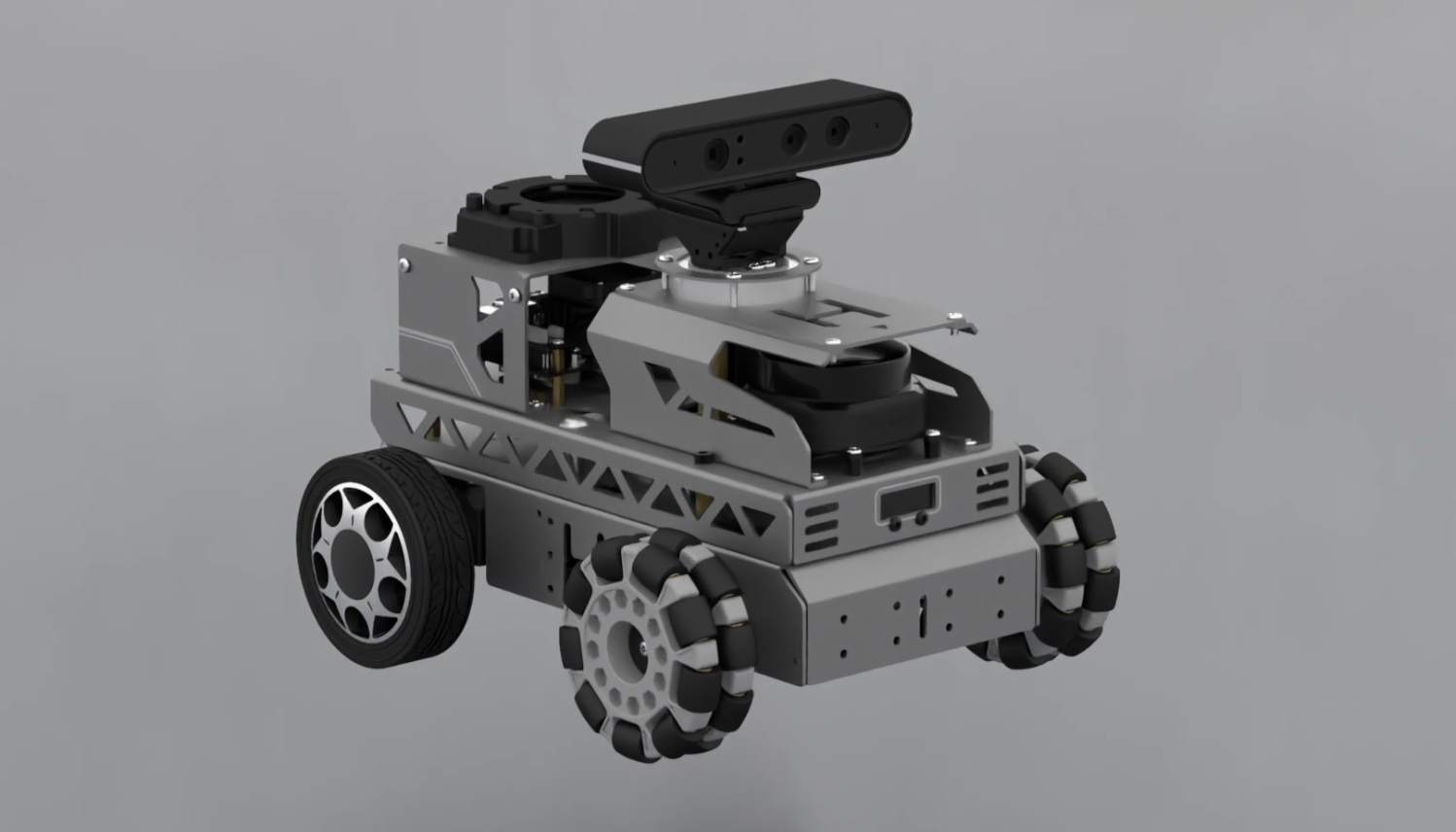
ROSOrin Multimodal ROS robot
ROSLander Multimodal ROS Educational Robot
ROSMan AI ROS Humanoid Robot
ROSipder Intelligent Hexapod Robot





Multimodal Composite Robot


Mapping Navigation, Path Planning
ROSOrin is capable of autonomously perceiving its environment, determining its location, and planning paths. Additionally, it can achieve high-accuracy mapping, multi-point navigation, and obstacle avoidance.
3D Vision, Target Tracking
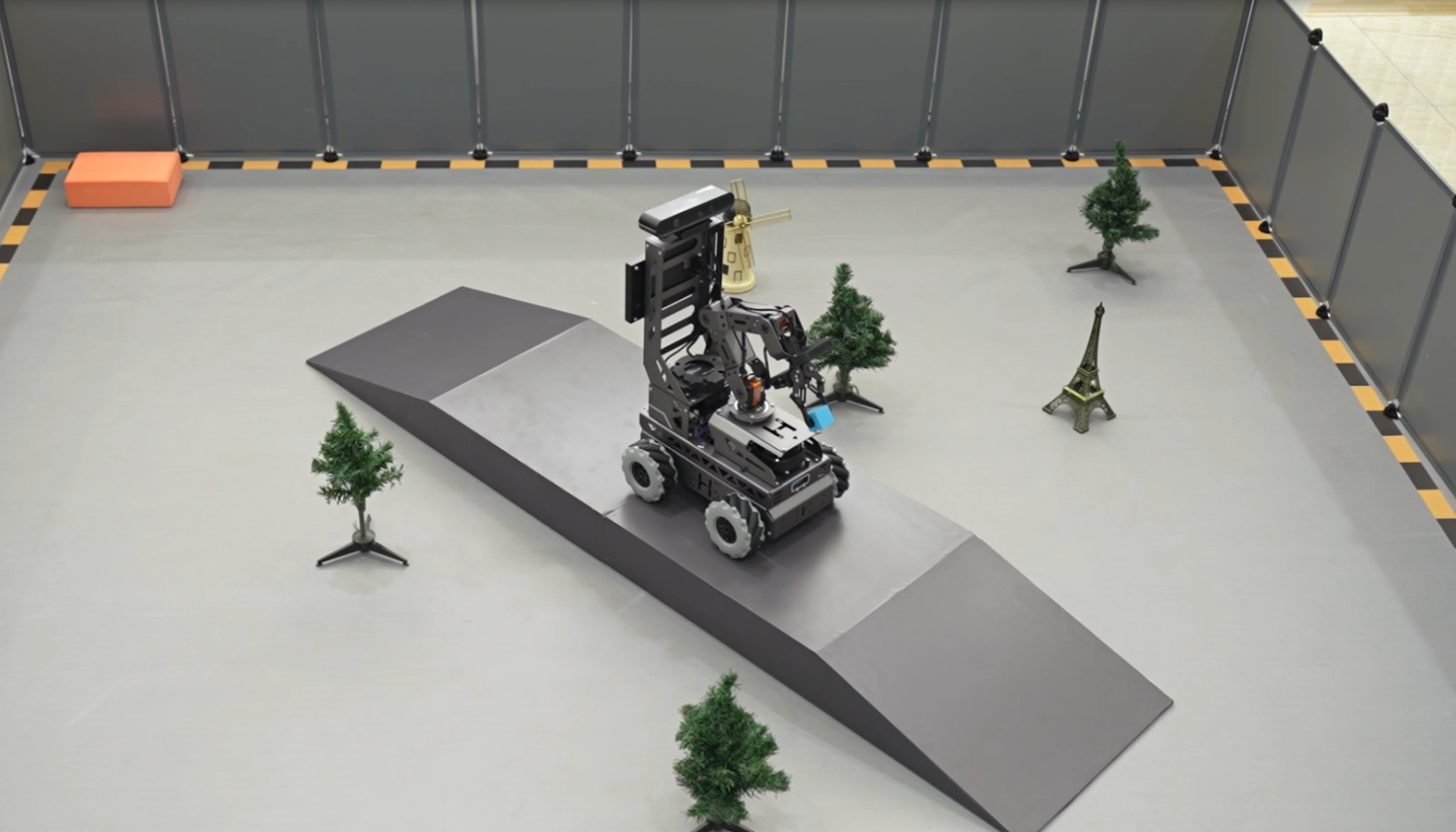
By utilizing the RTAB SLAM algorithm and integrating vision and LiDAR data, ROSLander can navigate and avoid obstacles in 3D maps.With depth map data collected by the 3D depth camera, users can create and deploy simulation environments for tasks such as target tracking, and bridge crossing.


Deep Learning, Practical Training
Establish a multi-scene training and testing platform to accommodate small-space venues. To cater to beginners' needs, it can be programmed to include functions such as autonomous driving, SLAM mapping, autonomous navigation, obstacle avoidance, autonomous reverse parking, and traffic light recognition.
Compatible with ROS1/ ROS2
The programs and source codes of ROSOrin are open-source and compatible with both ROS1 and ROS2. WonderNEX produces course materials such as ROS, robot hardware structure, and simulation teaching to provide users with a comprehensive deep learning platform.

.png)